ADLIPS, LINK 11 /14, CCS-280, CANEWS, CANEWS 2 and
Other Systems
ADLIPS is the acronym for Automatic Data Link Plotting
System and was a Canadian development, first started in 1973-4. It enabled
ships without tactical computer systems (ie St Laurent, IRE, Mackenzie
and Annapolis classes) to exchange tactical information with ships so fitted,
such as the DDH 280 class which uses the Command and Control System 280
(CCS 280). Generally speaking, the CCS computer polled the peripheral systems
and used the information to compile the Operational picture. Electronic
Warfare (EW) data was a one-way transfer; the CCS computer did not send
information back to the EW supervisor. That was done by intercom. In addition,
ADLIPS would permit Canadian ships to exchange tactical information
with our US and UK allies. Program delays meant that this new system was
only fitted to a few ships by the early 1980's.
ADLIPS was a federated system. A federated system is one
where a central processor controls all the inputs and outputs. Unfortunately
everything in a federated system dies if the central computer goes down
for any reason. In contrast, the CCS for the new Halifax Class ships
is a distributed architecture system. Canada pioneered this system in destroyer-sized
ships, building on the strengths of the CCS 280 system. In distributed
architecture, all systems are attached to a data bus. The failure of a
subsystem only causes a graceful degradation of the overall system, not
a complete failure. The sonar and EW systems supplied information to ADLIPS
when interrogated. There was one display dedicated to air control and one
anti-submarine (A/S) position. Sonar data from a helicopter could be displayed
on ADLIPS.
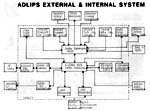 |
ADLIPS External and Internal Block Diagram
circa 1985. Click to enlarge. System components are represented within
the dashed box on the drawing . The AN/UYK-505 computer was basically the
UYK-502 with a memory upgrade from 64 kb to 128 kb of memory. ADLIPS is
now obsolete. (Drawing courtesy Canadian Navy) |
Gary Isliefson is a hardware engineer who designed many
of the components in the UYK-502 and 505 computers. He recalls the
following. "One web reference states that in a later development, the
UYK-502 received a memory upgrade from 64 to 128 kb and was renamed the
UYK-505. That is incorrect.
AN/UYK-505 was actually a Canadian version of the AN/UYK-20, not a variant
of the UYK-502. The memory upgrade mentioned for the 502 wasn't really
a memory upgrade, but rather an ordering option. It could be ordered with
64KB of core memory or up to 256KB (I believe ) of Dynamic RAM. It also
had a CMOS static memory option but its capacity was less than the DRAM
memory. The core memory option was attractive to users who wanted
their programs to survive while the equipment was powered off since
core memory is non-volatile. Its drawback was density and speed. The core
memory was one of the products fabricated in Winnipeg. There wasn't
much demand for UYK-502's operating on core memory so its unlikely
the Canadian Navy purchased machines with core memory.
The real upgrade to the UYK-502 occurred in the early 90's with the
development of the AN/UYK-507/ AN/UYK-44EP. This was a true custom ASIC
(Application Specific Integrated Circuit) solution which executed
the same programs but at much higher frequency (approximately 50
MHz versus 200 KHz). It was a joint development by engineers from Sperry-Univac
Winnipeg and St. Paul working together. All frigates were upgraded to this
computer and it continues to serve to this day (2009). I believe
that there were more 507's produced than 502's, a really an impressive
achievement."
World Naval Weapons Systems 1991-92 provides the following
ADLIPS description:
"Automatic Data Link Plotting System, a "poor man's NTDS" (Naval Tactical
Data System), was developed as part of the Canadian DELEX (Destroyer Life
Extension) program. Like NTDS, ADLIPS integrates shipboard sensors and
provides both Link 11 and Link 14 communications capability. Until ADLIPS
had been installed, only the four Tribal-class destroyers had Link 11 capability.
Thus, the older ships could not rapidly exchange ASW (Anti Submarine Warfare)
data, nor could these ships fully integrate with the 280 Tribals. The ADLIPS
contract was awarded to Litton of Canada.
Like NTDS, ADLIPS displays both raw radar data and synthetic video,
including data received over Links 11 and 14; it also replaces existing
obsolete electro-mechanical plotting tables (such as dead-reckoning tracers).
ADLIPS was developed using only existing components, which had to be integrated
with the existing sensors.
The central computer is the standard U.S. UYK-20(V) minicomputer [16-bit],
rather than the UYK-7 [32-bit] used in contemporary versions of NTDS. The
key system decisions seem to have been to minimize the actual computing
load (e.g., in target evaluation), and also to distribute that load (e.
g., to rely on the existing computerized EW and ASW systems). The only
weapons directly controlled by the UYK-20 are the gun and any missile the
ship might carry. The ships involved carry only the ASROC weapon.
Link 14 data is entered directly (which is unusual in NTDS systems)
through a special interface. There is an analog-to-digital converter for
radar, log/gyro, and sonar data (the converter transmits data to the gun),
and the UYK-20 connects directly to the Canadian ASW Data System (ASWDS),
where that system has been installed. A similar computer-to-computer channel
connects the ship's EW system with ADLIPS. Finally, Link 11 and other encrypted
digital data links feed directly into the computer via a modem and a decrypter.
The main display is the Situation Information Display (SID), a 20-inch
CRT showing raw video, IFF data, and synthetic video. There are 3 operating
stations around the horizontal SID, each with its own trackball and alphanumeric
keyboard. This type of display was chosen to minimize space requirements
in a relatively crowded operations room (CIC) already filled with radar
and sonar displays. There are also 22 x 22-cm plasma displays, which show
only synthetic video (bridge, EW control room). The system can carry 140
tracks (100 moving, 40 static) plus 6-min track-position histories for
25 targets and velocity vectors for the 100 tracks. As in NTDS, the operators
at the consoles detect the targets, so that each SID can insert 3
targets into the system simultaneously.
The system is federated, in that each SID carries its own replica of
the data base and carries out its own display-related computations. However,
most of the computing power of the system resides in its central computer.
Litton sees the duplication of the data base in the SIDs as insurance against
the failure of the central computer.
Development began in August 1979 to replace manual plots in non-TDS
ships. ADLIPS is interesting as the simplest and least expensive mechanization
of such plots and, thus, should have had considerable export potential.
In fact, it never sold abroad, but Litton Canada is trying again with ADLIPS
90. The Canadian Navy bought a total of 19 systems, 3 for its Fleet School
and 16 for installation in the St. Laurent (2 SIDs, 2 plasma displays),
Improved Restigouche (2 SIDs, 2 plasma displays), Mackenzie (1 SID, 2 plasma
displays), and Annapolis (2 SIDs, 2 plasma displays) classes. Installation
time is around 10 weeks per system.
The ADLIPS concept was first proposed in a Fleet Operations Study in
1968; the problem as then understood was that ships without a Link 11 capacity
could not take full advantage of information available to those with modem
tactical data systems. In 1969, the Canadian Navy headquarters proposed
a solution in which Link 14 data was automatically projected optically
onto a perspex surface. That idea, in sum, led to a Canadian Navy Operational
Requirement (OER M3/72), released on 8 February 1973, calling for
a system that could receive, filter, and plot either Link 11 or Link 14
data (but not both), with Link 11 (digital information) the first priority.
In fact, as installed, ADLIPS can receive and display both types
of information. The first R&D contract was awarded in June 1973
to Computing Devices Co. of Ottawa, and a prototype system was delivered
for initial tests in August 1975. A shipboard prototype went to sea aboard
HMCS Athabaskan in July 1976. The first production installation was in
HMCS Skeena in October 1981; the last was in 1985.
The designers sought to limit costs by avoiding any new equipment;
hence the use of the standard UYK-20 [1] computer. The only entirely new
elements are some unique interface cards and the software".
One operator remembers his experiences with ADLIPS.
"I trained and used the ADLIPS in Esquimalt, HCMS Nipigon and
HMCS Ottawa from 1989 to 1992. Recently I was discussing trouble-shooting
a printer with a colleague. During my training in Esquimalt in 1989-90,
my instructor noted that the most important thing to know about the ADLIPS
was the O-N-O-F-F switch.
Of course, when he said this, we all went .. huh.. What's the O-N-O-F-F
switch? Another thing of note was that we also did table training before
we did much ADLIPS training. Table training consisted of multi-contact
reports over a period of 15 minutes. Learning to write upside down as the
tracker needs to update the table not read it, figuring out closest point
of approach and closing on a steady bearing by hand (the last one is kind
of easy).
The ADLIPS system was stable sometimes and had other times of great
instability. In Nipigon software updates were delivered by tape (the boot
disk) frequently and we sometimes saw the folks from DRE ( Defence Research
Establishment) come and visit and pull it apart. They would never talk
to us Seamen though, because, of course, their work was above Top Secret.
The system worked well provided there were a low number of contacts."
LINK 11 and 14
LINK 11
Both Link 11 and Link 14 are NATO standards for tactical data transmission
over radio frequencies. This was the link used to transmit and receive
data between ADLIPS systems. Security for LINK11 was provided by the TSEC/KG-40
cryptographic security system.
World Naval Weapons Systems 1991-92, describes Link 11:
"Link 11 was conceived by a CANUKUS (Canadian-U.K.-U.S.) Naval Data-Transmission
Working Group (NDTWG) formed in 1954 to design a standard intership data-link
format and a terminal. By 1956 the group had decided on the Kineplex modulation
technique (which is still used), and the 30-bit message format consisting
of data plus error detection and correction codes. The final proposal was
ratified at Ottawa in late November 1957. The Royal Navy proposed a name,
TIDE (Tactical International Data Exchange); the TIDE committee met
at frequent intervals through 1960. The TIDE link was made the subject
of a NATO standardization agreement (STANAG) in 1960-61. Four alternative
links were under consideration at this time: Link 11 (a fast automatic
HF link), Link 12 (fast automatic UHF), Link 13 (slower, hence cheaper,
automatic HF), and Link 14 (slow semiautomatic HF/UHF). The U.S. Navy pressed
for the HF links because it expected to operate its ships in dispersed
(primarily anti- nuclear) formations, and HF (unlike UHF) could pass beyond
the horizon. Hence the dominance of Link 11, with Link 14 as a backup for
ships not equipped to decode and use Link 11 data.
Reportedly, the TIDE link was initially designated Link II (Roman 2),
the earlier British digital link associated with the comprehensive display
system (CDS) being Link I. Link III was presumably the original designation
for what became Link 10. That would explain the designation of the air
link as Link IV; the Roman 2 was misread as an eleven. This history would
explain the absence of Links 59.
The name TIDE was reportedly inspired by the name of a popular U.S.
laundry detergent, Tide; the data link would help clean up a messy tactical
picture. Many contemporary television commercials showed Tide (or some
other advertised detergent) as superior to an alternative, less expensive,
"Brand X." It seems likely that the name Link X (which became Link 10)
was inspired by that parallel (Link 10 is, after all, a less capable but
also less expensive data link)".
Link 11 is based on 1960's technology and is a relatively slow link
which normally operates on a polling system with a Net Control Station
polling each participant in turn for their data. Messages are transmitted
as 30-bit data frames, each consisting of 24 bits of encrypted message
data plus 6 bits of error-detection code. In addition to this Roll
Call mode, Link 11 may be operated in a broadcast mode in which a single
data transmission or a series of single transmissions are made by one participant.
Link 11 is, therefore, a half duplex link. It is secure but not ECM-resistant.
Data is transmitted using the modulation scheme called differential
quadrature phase-shift keying. Only two data rates are supported depending
on the band of operation - 1364 bits per second on HF/UHF
or 2250 bits per second on UHF. The Link was designed for operation on
High Frequency (HF) ground wave so it has a theoretical range of approximately
300 nm. Link 11 can also operate in the UHF band but it's then limited
to line-of-sight ranges (approximately 25 nm surface-to-surface or 150
nm surface-to-air). HF operation is AM; UHF is FM. Link 11 uses both upper
and lower sidebands of the radio signal to achieve a degree of diversity.
The system worked well provided there were a low number of contacts.
LINK 14
Basically, Link 14 is a teletype link allowing ships with a tactical
data processing capability to send to ships that are not equipped with
any system. The data produced on this link can be read from a teleprinter
and plotted manually by hand if necessary. Link 14 can be either HF, VHF
or UHF depending on the communication fits of the ships sending the data.
Each nation within NATO has its own Link 14 transmission formats which
are promulgated in publication ADatP14. Message protocols are defined in
STANAG 5514.
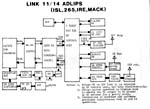 |
Link 11 is the radio component of the
ADLIPS system. This was the fitting in ISL, 265, IRE and Mackenzie
Classes. Click to enlarge.
Processed target data from the UYK-505 computer was encrypted by the
KG 40 crypto unit and applied to the Link 11 Data Terminal Equipment. From
there is was sent over the air by the SRC-511 ADLIPS transceiver. The Link
14 was an interface between the UYK-505 computer and the ship's teletype
radio equipment. Limitations of hardware and software of that era precluded
simultaneous Link 11 and 14 operation. (Drawing courtesy Canadian Navy) |
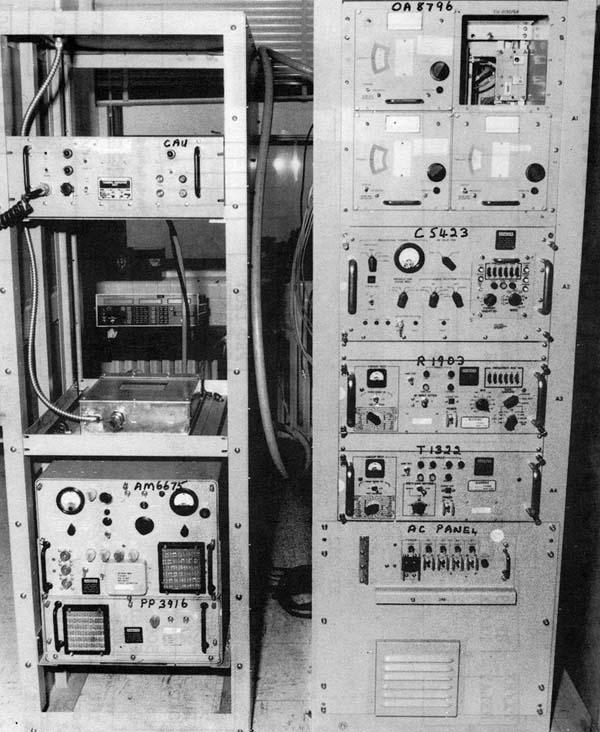
AN/SRC-511 ADLIPS Transceiver
|
|
AN/SRC-511 ADLIPS Transceiver. See description below. (Image
courtesy Canadian Navy)
|
|
AN/ SRC 511- CHARACTERISTICS
Purpose - Designed to be used for Link 11 HF on ADLIPS fitted ships.
Frequency Range - 2 to 29.999 MHz
Modes - Data (ISB,USB,LSB), Voice (ISB,USB,LSB), AME, CW, FSK. Has
its own low level keyer but it is not externally wired for TP operation.
Power Output - 1 KW in all modes.
Power Input - 110 V 60 Hz ; RF amp requires 440 V 3 PH
MAJOR UNITS:
-----------------
OA 8796 Antenna coupler group - 4 pre selectors provides tunable filters
for the receiver in the bands 2 to 6 MHz, 4 to 12 MHz, 10 to 17 MHz
and 17 to 30 MHz. In addition, the preselectors protects the receiver from
high RF input.
C 5423/SRC - HF Control Unit . Audio switching unit and frequency standard
supply 100 KHz and 1 MHz.
R 1903 Receiver - Receives all modes 2 to 29.999 MHz.
T 1322 Exciter or transmitter. Transmits approximately 100 milliwatts
in the frequency range 2 to 29.999 MHz.
Power Distribution Panel - Distributes 110 VAC to all units.
AM6675/URT - RF amplifier. Increases the 100 millwatt signal from the
exciter to 1000 watts.
PP 3916(Mod/UR) - Power Supply Distributes 440 V to the RF amp
C1007 Transmitter Control Unit . Provides frequency and mode control
signals to the transmitter exciter (insert of 5423) |
CCS-280
Traditionally, EW systems have been somewhat autonomous, or
set apart physically and logically from the remainder of the ship's combat
systems. Not until the DDH-280 Class, with its sophisticated CCS-280 command
and control system, was introduced in the early 1970s was there any attempt
to integrate EW with the ship's command and control system. Even then,
the extent of intergration was minimal by today's standards. Electronic
warfare simply stood off in its own compartment - a world unto itself.
This excerpt from World Naval Weapons Systems 1991-92 describes the
CCS-280 system.
"CCS-280 is the Tribal (DDH 280) class Command and Control
system. These ships were intended as squadron flagships and as such can
send and receive Link 11 messages as well as handle Link 14. CCS-280 is
built around a single Litton USQ-501 (L-304F) computer, connected to 7
multifunction situation-display consoles (SDC) in the operations room (CIC),
connected in series, i.e., sharing the same data base held by the main
computer. One console is used for command; the others can shift in role
from situation to situation. Typically, 1 is used for air and 1 for surface
detection and tracking. One might be used to control the ship's helicopter;
others might be used for target evaluation, intercept direction, weapons
coordination, and engagement monitoring.
There are separate dedicated consoles for sonar (feeding the ASW computer),
for fire control (feeding a fire-control computer, for the 5-in gun and
the Sea Sparrow missiles), and for EW (feeding a data processor). Link
11 also feeds directly into CCS-280, as do the main navigational sensors
(gyro and log). The 32-bit computer has a capacity of 40k words (expandable
to 80k), and the displays can show objects at ranges of up to 152 nm. This
system was one of the earliest applications of fault-isolation software.
The consoles show both raw and synthetic video. Operators communicate
with the consoles via light pen, keyboard, and trackball. Tracking is manual
with update (i.e., rate-aided), and the system can handle surface-target
speeds of up to 64 kt and air-target altitudes up to 64,000 ft. CCS-280
can store up to 237 tracks (of which 50 may be targets). Like NTDS, CCS-280
conducts TEWA and also directs interceptions (in this case by both aircraft
and the assigned ASW helicopter). The system can also display alternative
tactical options.
CCS-280 was installed on board the two Annapolis-class frigates as part
of their DELEX (Destroyer Life Extension) modernization. CCS-280, then,
is a small-ship NTDS equivalent, roughly contemporary with the German SATIR.
The Canadian Navy described it as the first operational micro-electronic
tactical data system for shipboard situation assessment and control.
A Canadian naval-technical historian remarks that the "Tribal" design
was the first in which the operational requirement emphasized adequate
data-exchange capability. The design was federated: the central command/control
system interfaced with autonomous weapons and ship-control subsystems.
Thus, the subsystems could continue to function if CCS-280 failed. They
would lose their ability to communicate by data link with other ships.
Similarly, the failure of any subsystem would not crash the system as a
whole. CCS-280 was also intended to support a group commander as well as
a commanding officer. This modular design was a new concept, and
presumably it was conceived as a way to avoid the computer-capacity squeeze
experienced in the fully centralized AIS 240.
The design contract was awarded to Litton(Canada) in September 1966;
the main combat subsystems were UCS 280 (ASW), SAWS (surface- and air-
warfare system), and EWIS 280 (EW system)".
OTHER SYSTEMS
This excerpt from the paper "A TIMELINE OF CANADIAN ACHIEVEMENT IN NAVAL
TECHNOLOGY" by Pat Barnhouse and Michael Young (2000) summarizes some of
the other systems which were finding their way into HMC Ships in the 70's
and 80's.
"In 1977 the Destroyer Life Extension Project (DELEX) was given
planning approval. This project demonstrated yet again the efficacy and
flexibility of the basic St Laurent design in that adequate space and weight
margins were available for added equipment at a late stage of the ship's
lives.
Cabinet also approved the definition phase of the Canadian Patrol Frigate
Project. This paved the way for imaginative developments by some
far sighted naval engineers, such as (then) Cdr. Jim Carruthers who pioneered
and advocated the distributed architecture approach using data buses, standard
processors and displays that became SHINPADS which, despite considerable
political obstacles, eventually found their way into the ships.
The key systems, all at various steps in the development process in
1977, were:
* SHINPADS. Shipboard Integrated Processing and Display System
[2] providing a distributed and redundant (and thus survivable) computer
architecture throughout the ship.
Gary Isliefson, a hardware engineer, helped to develop the SHINPADS
system. He provides this brief, high level, technical overview of the system.
" The Canadian Navy used SHINPAD versions of the AN/UYK computer series.
We had UYK-502's (and then 507's) which embedded various versions of the
SHINPADS network controller (node) inside the 502's cabinet. The box looked
very similar but inside it would contain either 1, 2, or 4 SHINPADS "nodes".
The one or two node systems co-resided with a stripped down UYK-502, while
the "quad node" box just had four SHINPADS nodes in it. A node consisted
of seven 6 x 9 inch cards and communicated to the computer by either NTDS
parallel, NATO serial, or the internal computer bus known as the "RMF"
bus. Another piece of the network was the Bus Access Module (BAM) which
was physically removed from the node. A triax cable was used to connect
the node to the BAM. The BAM's connected to each other via the main triax
cables, which were the main network cables. A node would be connected to
up to 6 BAMs for redundancy.
The SHINPAD's network was an impressive network for its time. For example,
in the commercial world, 10Mbit Ethernet was just emerging, at that time.
Early Ethernet used the "vampire" connections to attach stations to a
thick coax cable (10B5) . At the time, SHINPADS ran a the same 10Mbit rate,
but was considered a real-time network with predictable packet latencies,
etc. It also didn't waste bandwidth on a preamble like Ethernet does. It
also had provisions for redundancy where it used up to six cables to transmit
and control messages. You could cut the active cable and the controller
would detect that and automatically switch to another cable. The SHINPADS
network implemented on the Halifax class frigates only used 4 of the possible
6 cables. All of the SHINPADS network infrastructure was designed in St.
Paul Minnesota and transferred to Canada around 1983. The hardware was
built in Winnipeg.
This variant of the SHINPADS network was also used by the Americans
on some of their programs. MATCALs is one I worked on (Marine Air
Traffic Control and Landing). Many years later, the SHINPADS node was reduced
to a single VME [3] based card with the same network protocol implemented
in FPGA's. Not many of these were produced".
* SHINMACS . An integrated machinery control system, processor
controlled, with innovative displays that simplified the task of the operator.
* SHINCOM . An integrated and digital, processor
controlled interior communications system based on a commercial telecommunications
switch.
* CANEWS. A passive electronic warfare system that combined Canadian
signal processing with British receiver and antennae technology.
Based on EW system development projects dating from the late 1960s.
CANEWS provides instantaneous threat detection, identification and warning
and will also be used to build and update a threat data bank. A main library,
which holds information on a large number of radar modes, provides
for background data collection. To meet immediate mission requirements,
a tactical library with pre-programmed threat radar signatures is used.
Analysis of the detected RF signal can identify the type of radar, type
ot platform, identity of the platform and give a confidence-level
indication. CANEWS is known internationally as the AN/SLQ-501 Shipboard
ESM set.
The system uses multi-band omni-directional receivers as well as a DF
receiver and covering the designated frequency spectrum, it provides instantaneous
frequency and bearing information. Fully automatic and controlled by one
operator, CANEWS uses sophisticated signal processing techniques to perform
real-time emitter analysis. The receiver's wide dynamic range provides
a very high probability of detection under extremely dense signal conditions
and it presents the information in real-time using a high resolution digital
television display. For situations which require close scrutiny, a manual
pulse analyzer is used and dense portions of the spectrum can be expanded
for more detailed examination. CANEWS is a fully automatic EW system, but
the system operator is always in control and can intervene at any point
particularly to resolve identification ambiguities. This manual override
facility is extremely useful when complex radar signal environments are
encountered.
The production CANEWS system, delivered by M.E.L. Defence Systems Ltd.
is comprised of a large programmable library of emitter characteristics,
back-to-back AN/UYK-505 computers and AN/UYQ-501(V) Shipboard Standard
Display. CANEWS is fully autonomous from the rest of the ship's systems,
but it can be interfaced directly to both an ECM system and to the ship's
command and control system data bus.
It's important to note that CANEWS was conceived in Canada, designed
to meet unique Canadian requirements and is the first EW system developed
for
Canada's own use.
The follow-on system to CANEWS was the CANEWS 2, a system which never
became operational. This detailed report by
Robert Inkol documents the reasons as to why the system
never went into production.
In summary, Electronic Warfare is a tricky thing. Only by developing
one's own source code does a country have any control over the system -
foreign suppliers are reluctant to share that technology making unique
own country needs difficult to implement.
 |
| A CANEWS workstation in use by engineers in the TEMPEST-screened development
facility at M.E.L. Defence Systems, Stittsville, Ontario. Dual AN/UYK-505
computers are mounted in the rack at the right. Above them is the CMTU
(Cartridge Magnetic Tape Unit) AN/USH-26(V). It used DC 300 tapes which
were used to download data to the UYKs in order to do maintenance,
threat libraries, load op system etc. (Assumed to be a M.E.L. Ltd photo) |
FOOTNOTES:
[1] The article mentions the use of the AN/UYK-20 in ADLIPS but the
RCN block diagram shows the UYK-505. It is believed that the UYK-505 is
a Canadian adaptation of the UYK-20. The UYK-20 was a militarized version
of the Unisys 1616 commercial computer with 65,000 words of memory. It
was first built in for the USN in 1974.
[2] The International Systems web page offers this additional information
. "The SHipboard INtegrated Processing And Display System (SHINPADS) is
a Canadian Forces Trademark and is not really a system. Rather, it is rather
a concept of ship integrationnot combat system integration or propulsion
and machinery system integration but ship integration. It encompasses
the entire ship system including all combat system equipments, marine engineering
systems, and extending into administrative support hardware. Other
aspects of the concept include standardization of hardware, software, and
interfacing".
[3] VMEbus is a computer bus standard, originally developed for the
Motorola 68000 line of CPUs, but later it was widely used for many applications
and standardized by the IEC as ANSI/IEEE 1014-1987.
Credits and References:
1) RCN's AOR/TRBL/ISL/265/IRE/MACK Class Equipment Handout.
September 1985.
2) Link 14 info http://www.stasys.co.uk/defence/datalinks/link_14.htm
3) Michael Young <ejmy(at)rogers.com>
4) James G. Dean <jgdean(at)sympatico.ca>
5) Bob Willson <rawillson(at)rogers.com>
6) Excerpts from World Naval Weapons Systems 1991-92
(Naval Institute Press, 1991).
7) Michael Potter <shipphoto(at)att.net>
8) Link 11 speeds: http://www.frequencymanager.de/TH_Link11.pdf
9) Bob Langille <ewcs(at)ewcs.ca
10) Shinpads http://www.usfamily.net/web/labenson/SystemsInternational.htm
11) AN/UYK-505 http://www.usfamily.net/web/labenson/Computers16.htm
12) Ken Bowering. "Canadian Naval Electronic Warfare:
A Review and Update". January 1986
13) Gary Isliefson <gc_isliefson(at)yahoo.ca>
14) VME Bus http://en.wikipedia.org/wiki/VMEbus
Back to Table of Contents
Sept 19/24

